roscon2024_workshop
Exercise 4 - Direct Node Connection
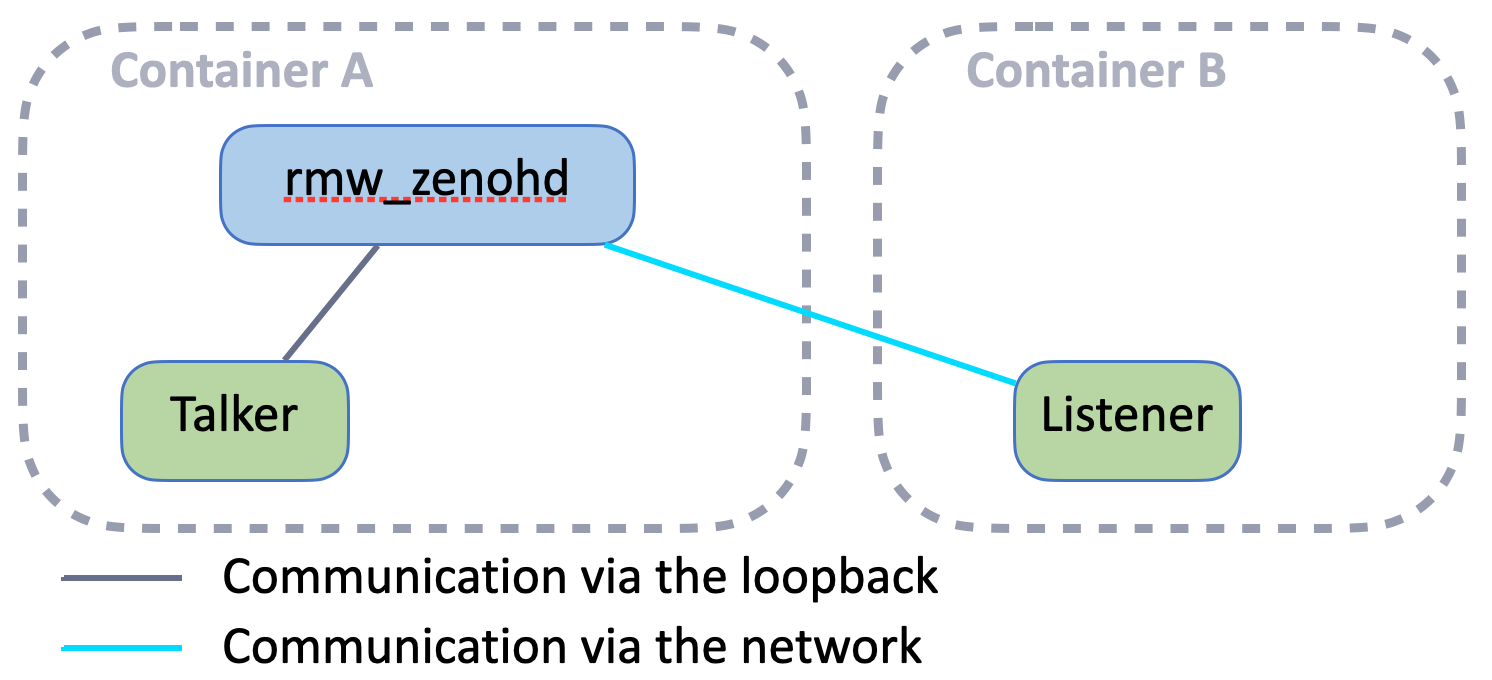
Deploying a Zenoh router on each host isn’t always necessary. In some cases, you may prefer a direct connection between your robot and a single remote Node (e.g., rviz2).
This can be achieved by configuring the Node’s Zenoh session to connect directly to the robot’s router, as shown below:
Configuration
Partner with another attendee and decide who will connect their container (A) to the other’s container (B). The attendee with container B needs to create a configuration file for the Listener Node to connect to the router in container A:
- Copy
zenoh_confs/DEFAULT_RMW_ZENOH_SESSION_CONFIG.json5tozenoh_confs/SESSION_CONFIG.json5 -
Edit
zenoh_confs/SESSION_CONFIG.json5as such:-
Change the
modefrom"peer"to"client"as such:mode: "client", -
And the set a
connect.endpointsconfiguration as follows (Replace<host_A_IP>with the IP address of the host running container A):
connect: { endpoints: [ "tcp/<host_A_IP>:7447" ], }, -
The attendee with container A has nothing to do. By default the Zenoh router is listening to incoming TCP connections on port 7447 via any network interface.
[!NOTE] The reason to change the Listener mode to client is that with by default for ROS 2 the router is configured with
routing.router.peers_failover_brokering: false, meaning the router will consider that each peer directly connected to him are also able to establish peer-to-peer connection. Thus it will not route data between the peers.But that’s not the case here, the peers cannot establish direct connection with each other because they are listening on
localhostonly! Configuring the Listener inclientmode forces the router to route data to him, as aclientmaintains only 1 connection (the one to the router).Another solution could be to set
routing.router.peers_failover_brokering: truefor the router, keeping Listener’s mode aspeer. The drawback would be additional management overhead for the router and extra messages during system startup which could penalize a large system with a lot of Nodes.
Run
Now, run the following commands in each container:
- In container A:
- Start the router:
ros2 run rmw_zenoh_cpp rmw_zenohd - Start the talker:
ros2 run demo_nodes_cpp talker
- Start the router:
- In container B:
- Start the listener:
ZENOH_SESSION_CONFIG_URI=/ros_ws/zenoh_confs/SESSION_CONFIG.json5 ros2 run demo_nodes_cpp listener
- Start the listener:
Bonus
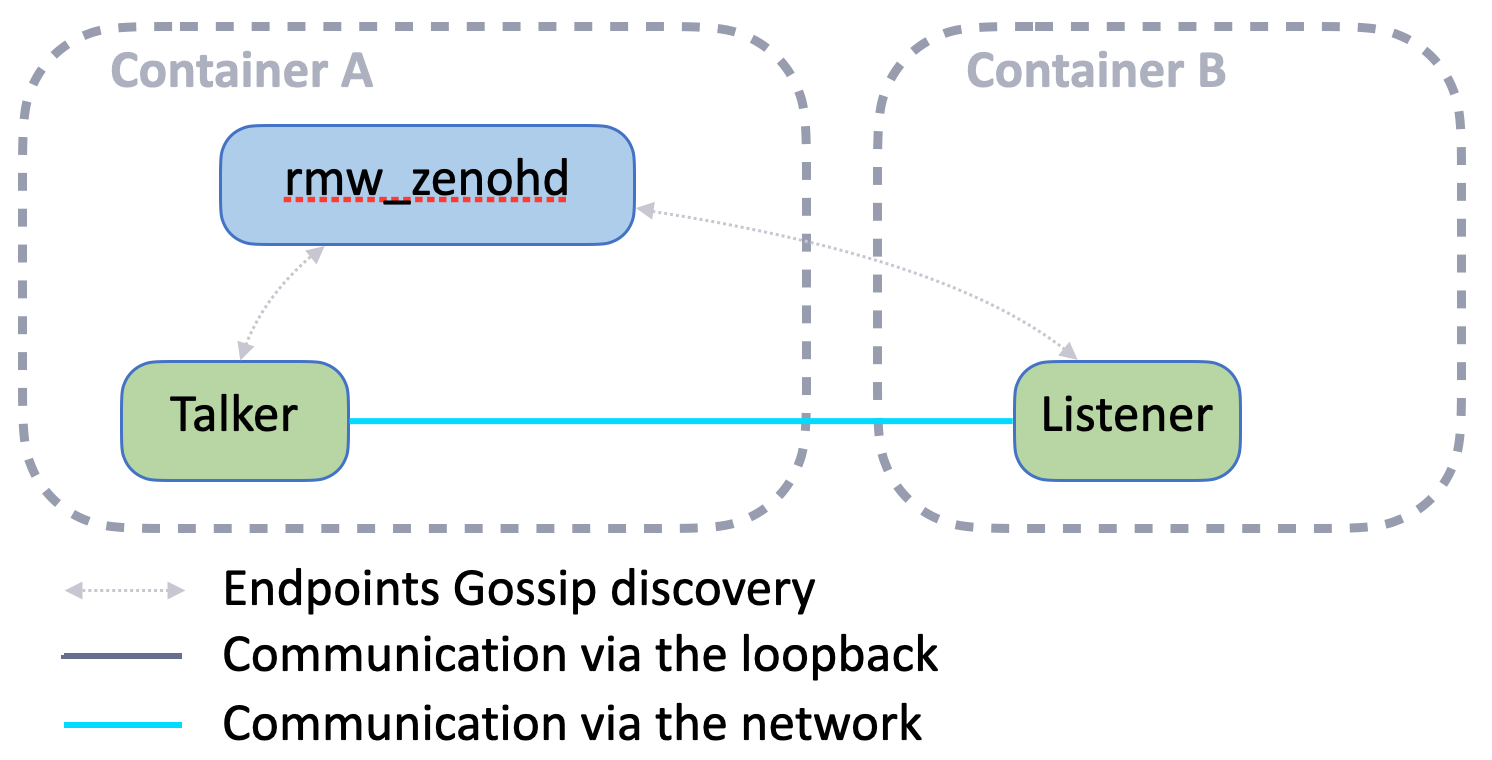
What happens if you stop the router in container A, and why ?
Answer
The communication between the Talker and the Listener stops! The reason is that there was no peer-to-peer connectivity established between the Talker and the Listener, since each one is by default listening for incoming connection only on their respective `localhost` interface. See the `listen.endpoints` configuration in [zenoh_confs/DEFAULT_RMW_ZENOH_SESSION_CONFIG.json5](/roscon2024_workshop/zenoh_confs/DEFAULT_RMW_ZENOH_SESSION_CONFIG.json5).How to fix this ?
Answer
You need to configure the Listener node in container B to listen for incoming connections on all network interfaces, not just `localhost`: - Edit `zenoh_confs/SESSION_CONFIG.json5` and set `listen.endpoints` configuration as follows: ```json5 listen: { endpoints: [ "tcp/[::]:0" ], }, ``` The Zenoh gossip protocol will do the rest: forwarding the Listener endpoint to the Talker, and the Talker will automatically connect to the Listener.