roscon2024_workshop
Exercise 5 - Discovery via UDP multicast
Even if not enabled by default in rmw_zenoh, Zenoh can be configured for discovery over UDP multicast in several aspects:
- For the routers to discover each other and to automatically inter-connect with each other.
- For the ROS Nodes to discover each other and to automatically inter-connect with each other. This allows a router-less deployment.
[!WARNING] If your host runs MacOS, your Docker probably doesn’t router the multicast traffic, even if the container is using the
--net hostoption. Therefore you won’t be able to participate to this exercise.
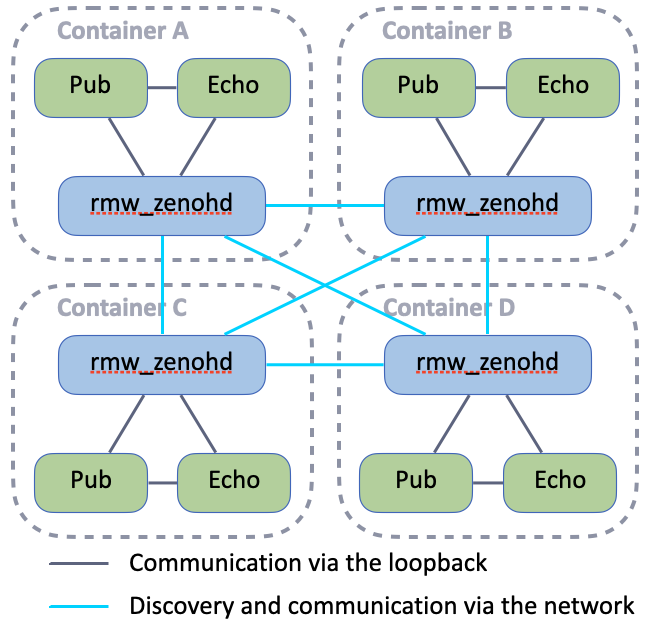
Routers discovery
Each attendee will run 1 container with the Zenoh router and a publisher and a subscriber on the same topic. The routers will be configured to discover each other over UDP multicast and to automatically connect to each other.
Configuration
Edit your zenoh_confs/ROUTER_CONFIG.json5 again to:
-
remove all endpoints in
connect.endpointsconfiguration:connect: { endpoints: [ ], }, -
configure the
scouting.multicastsetting as such:multicast: { /// Whether multicast scouting is enabled or not enabled: true, /// The socket which should be used for multicast scouting address: "224.0.0.224:7446", /// The network interface which should be used for multicast scouting interface: "auto", // If not set or set to "auto" the interface if picked automatically /// Which type of Zenoh instances to automatically establish sessions with upon discovery on UDP multicast. /// Accepts a single value or different values for router, peer and client. /// Each value is bit-or-like combinations of "peer", "router" and "client". autoconnect: { router: ["router"] }, /// Whether or not to listen for scout messages on UDP multicast and reply to them. listen: true, },
Run
Now you can run the following commands in your container:
ZENOH_ROUTER_CONFIG_URI=/ros_ws/zenoh_confs/ROUTER_CONFIG.json5 ros2 run rmw_zenoh_cpp rmw_zenohdros2 topic pub /chatter std_msgs/msg/String "data: Hello from <YOUR_NAME>"- (replacing<YOUR_NAME>)ros2 topic echo /chatter
Bonus
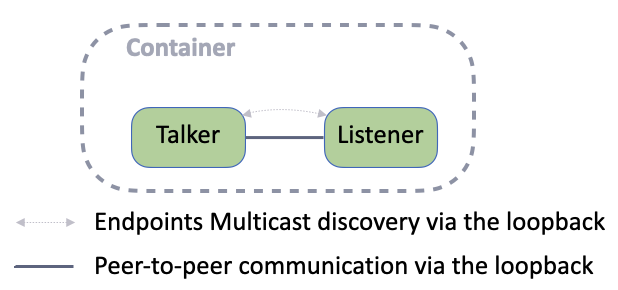
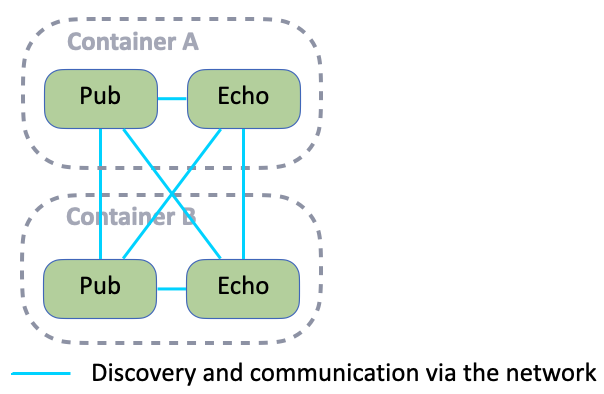
Try running rmw_zenoh Nodes without any router in 2 different configurations:
- the Nodes shall only discover the other Nodes running on the same host
- the Nodes shall discover all Nodes running in the LAN
Solution 1
 />
/>
Solution 2
 />
/>